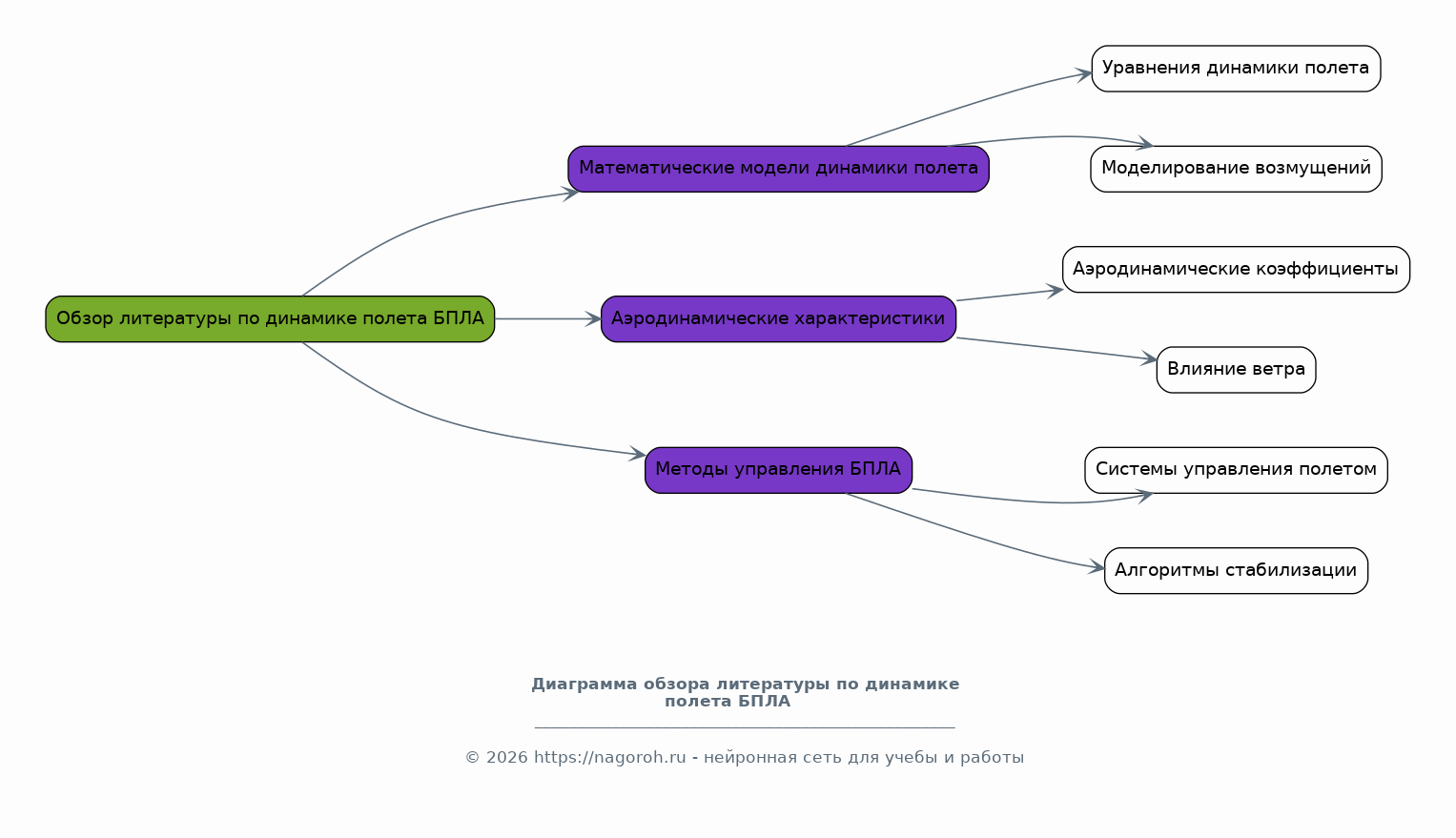
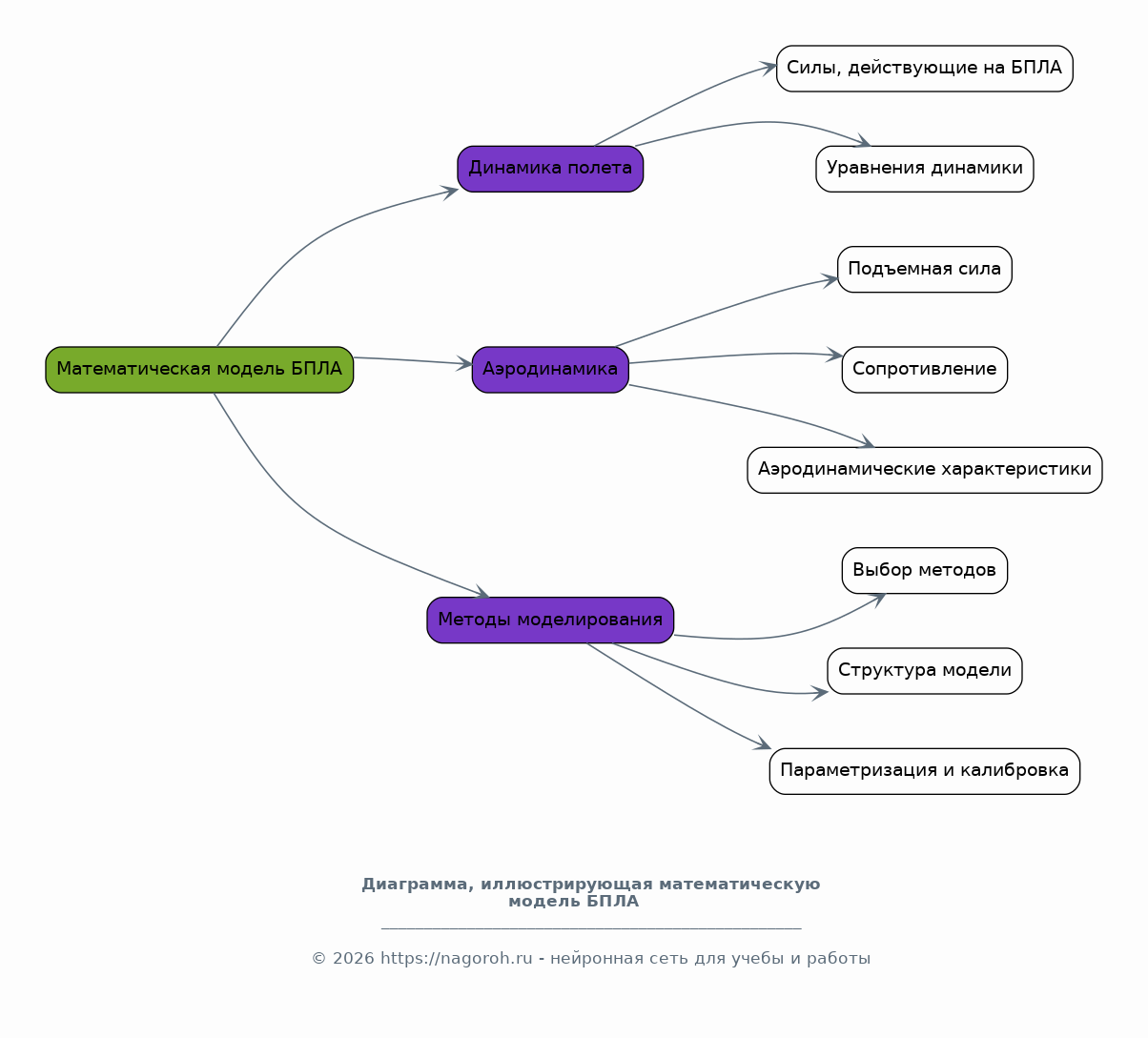
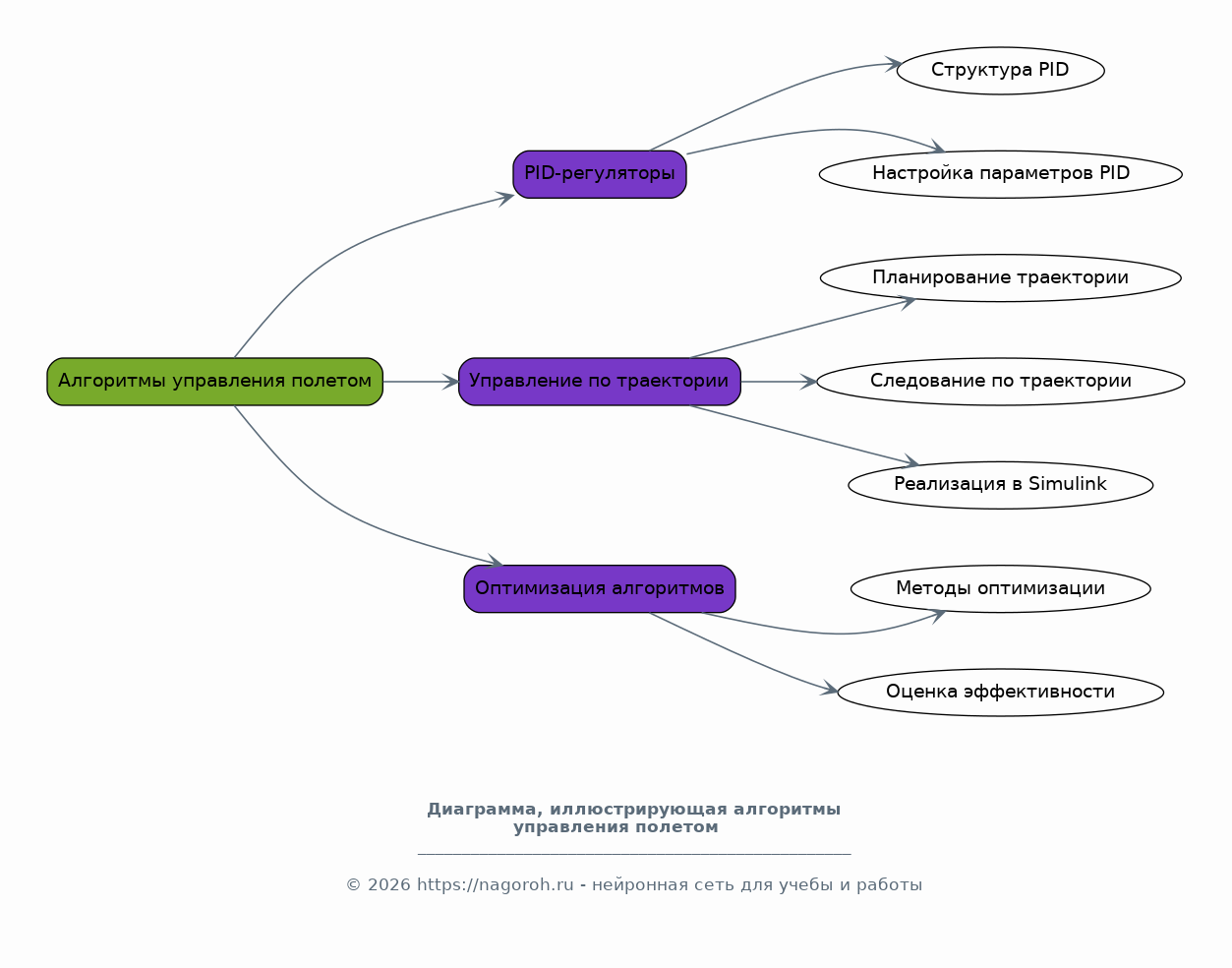
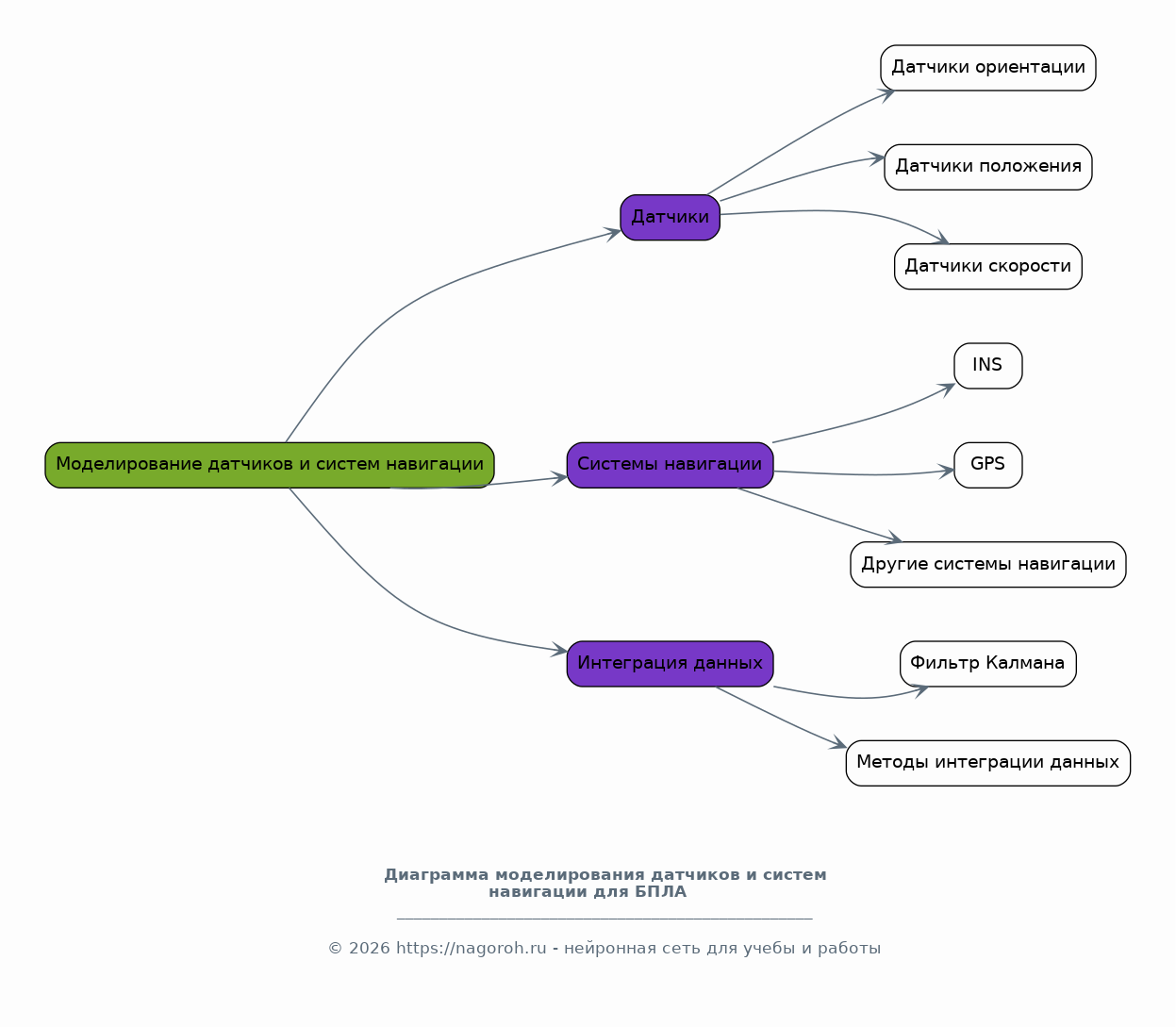
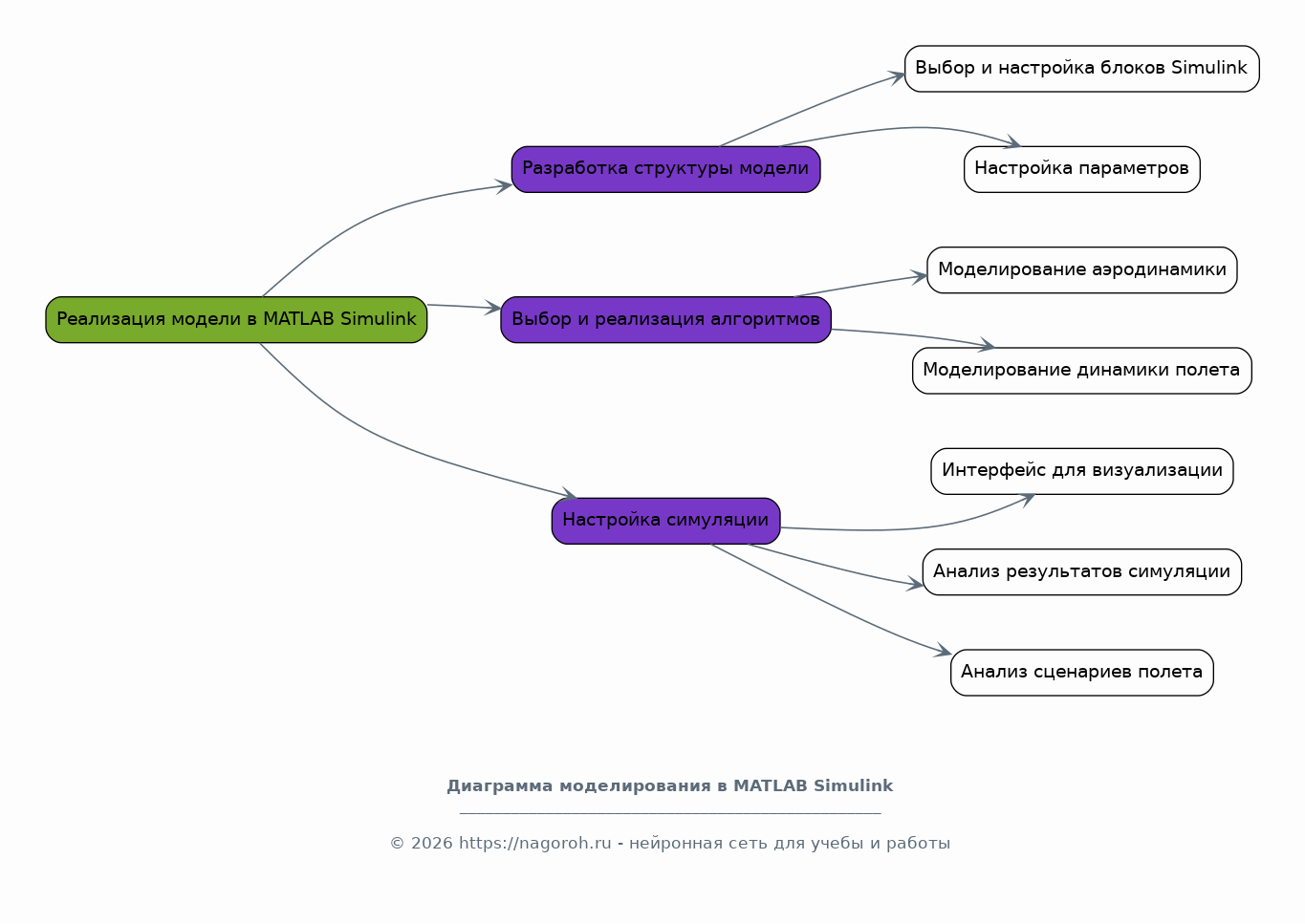
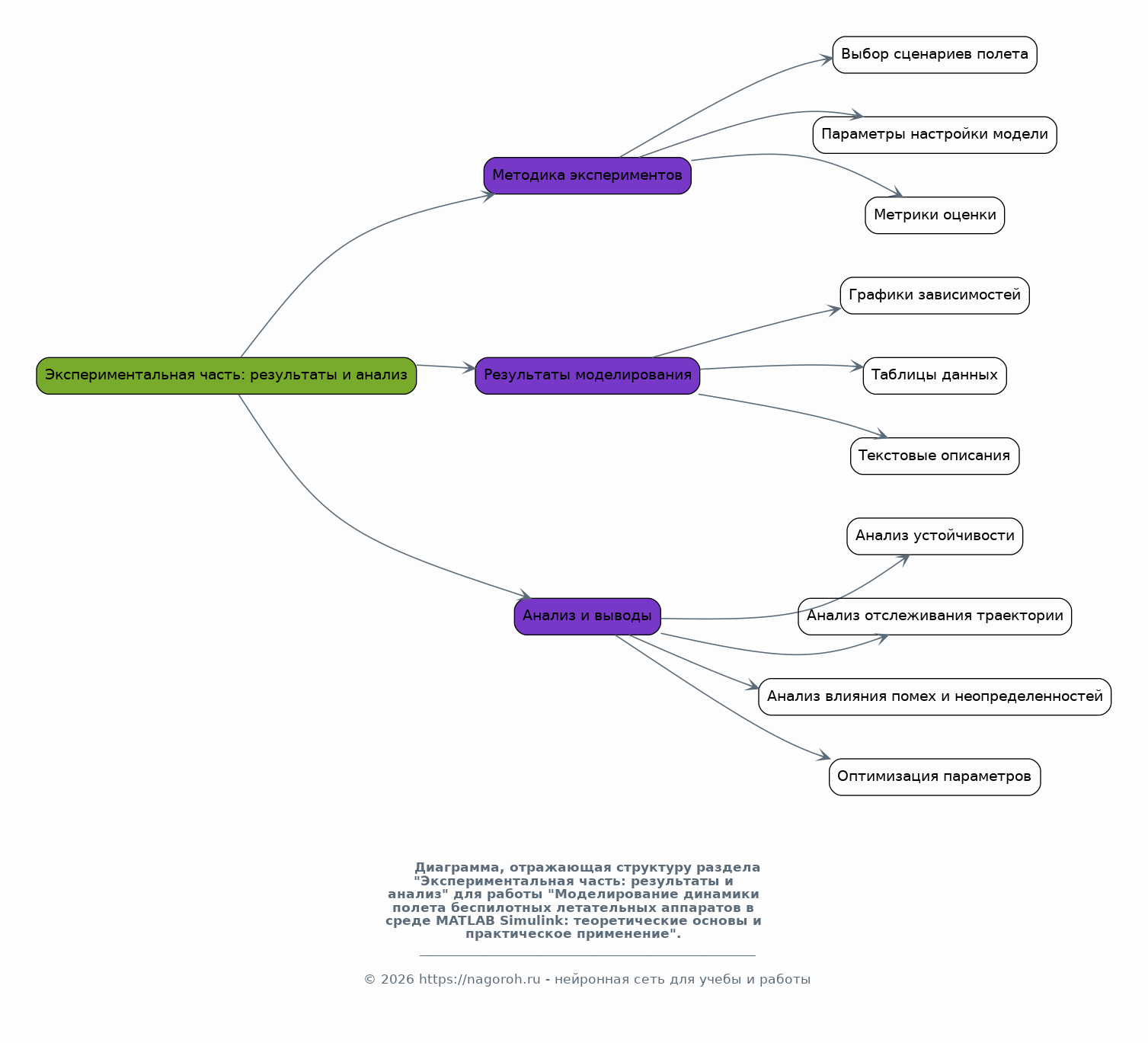
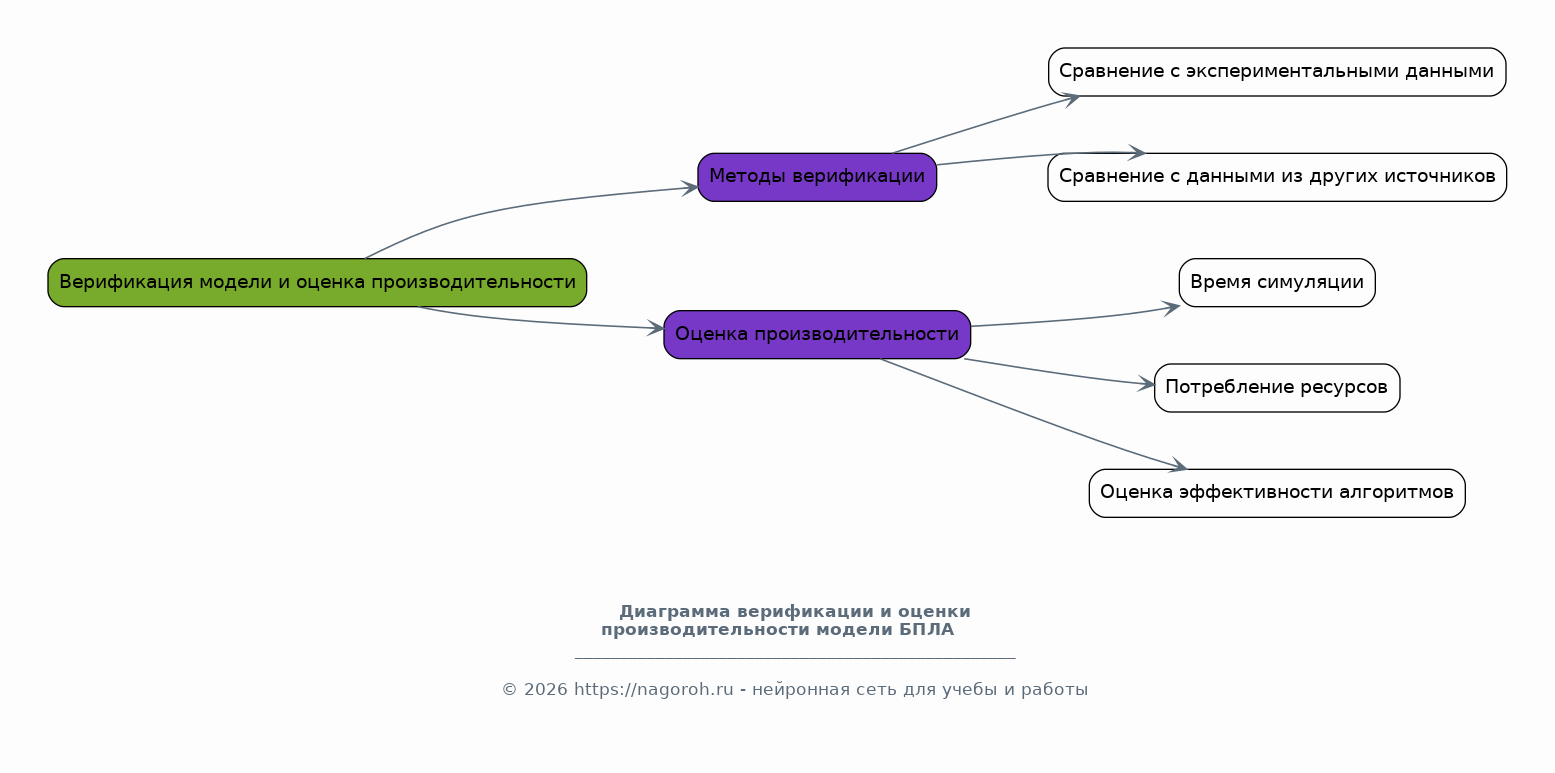
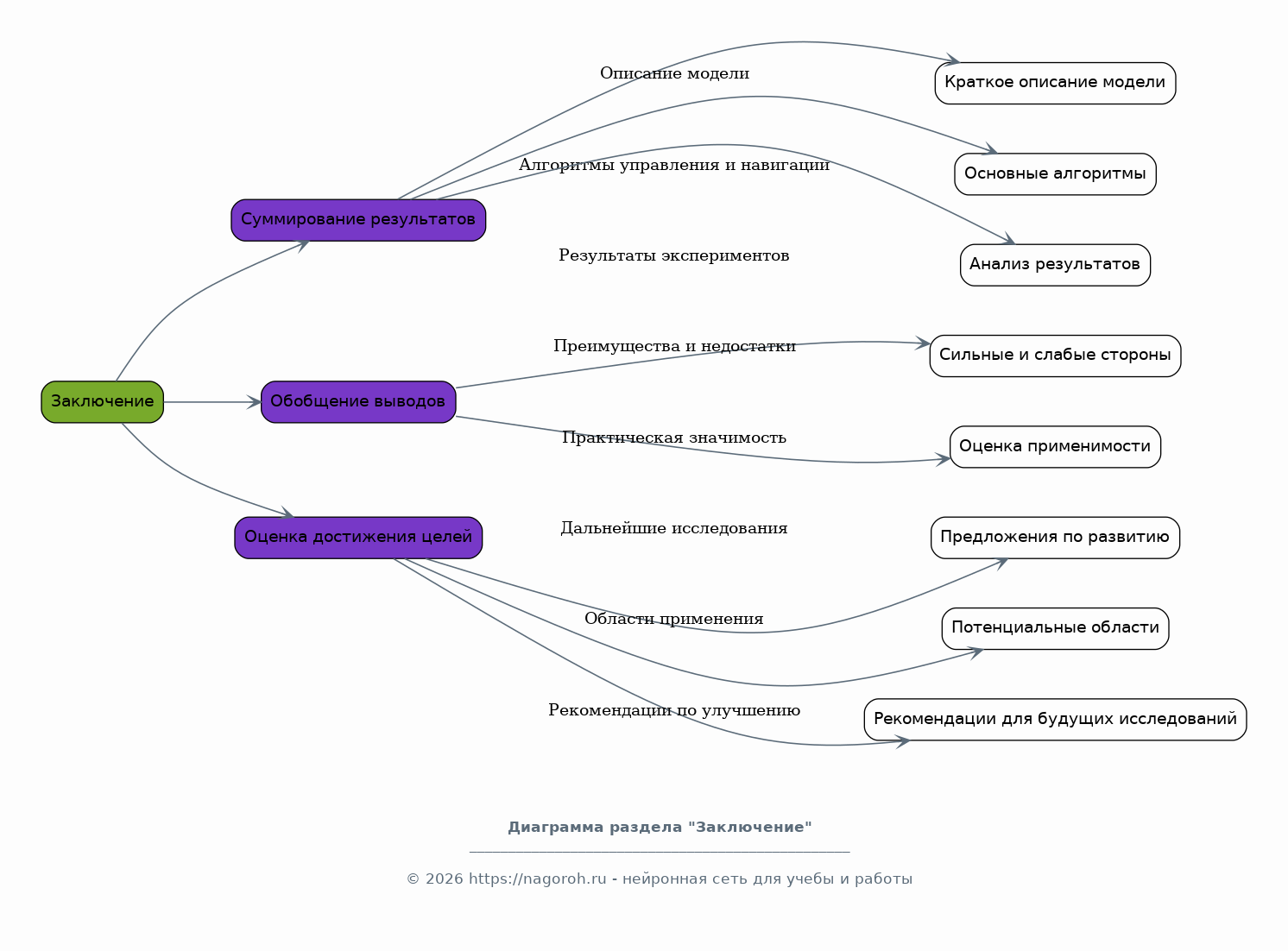
Данный исследовательский проект посвящен моделированию полета беспилотных летательных аппаратов (БПЛА) в среде MATLAB Simulink. Он включает в себя всесторонний анализ теоретических основ, связанных с аэродинамикой, динамикой полета, системами управления и навигации БПЛА. Проект ориентирован на практическое применение полученных знаний, предусматривая создание и отладку математических моделей, имитирующих поведение различных типов БПЛА в разнообразных условиях полета. В работе будут рассмотрены различные алгоритмы управления, датчики и системы, позволяющие обеспечить стабильность и управляемость БПЛА. Особое внимание будет уделено оптимизации параметров модели, верификации результатов моделирования и оценке производительности разработанных систем. В рамках проекта планируется проведение серии экспериментов, направленных на изучение влияния различных факторов на траекторию полета и характеристики БПЛА. Полученные результаты будут проанализированы и представлены в форме графиков, таблиц и текстовых описаний, что позволит сделать выводы о эффективности выбранных методов моделирования и управления.