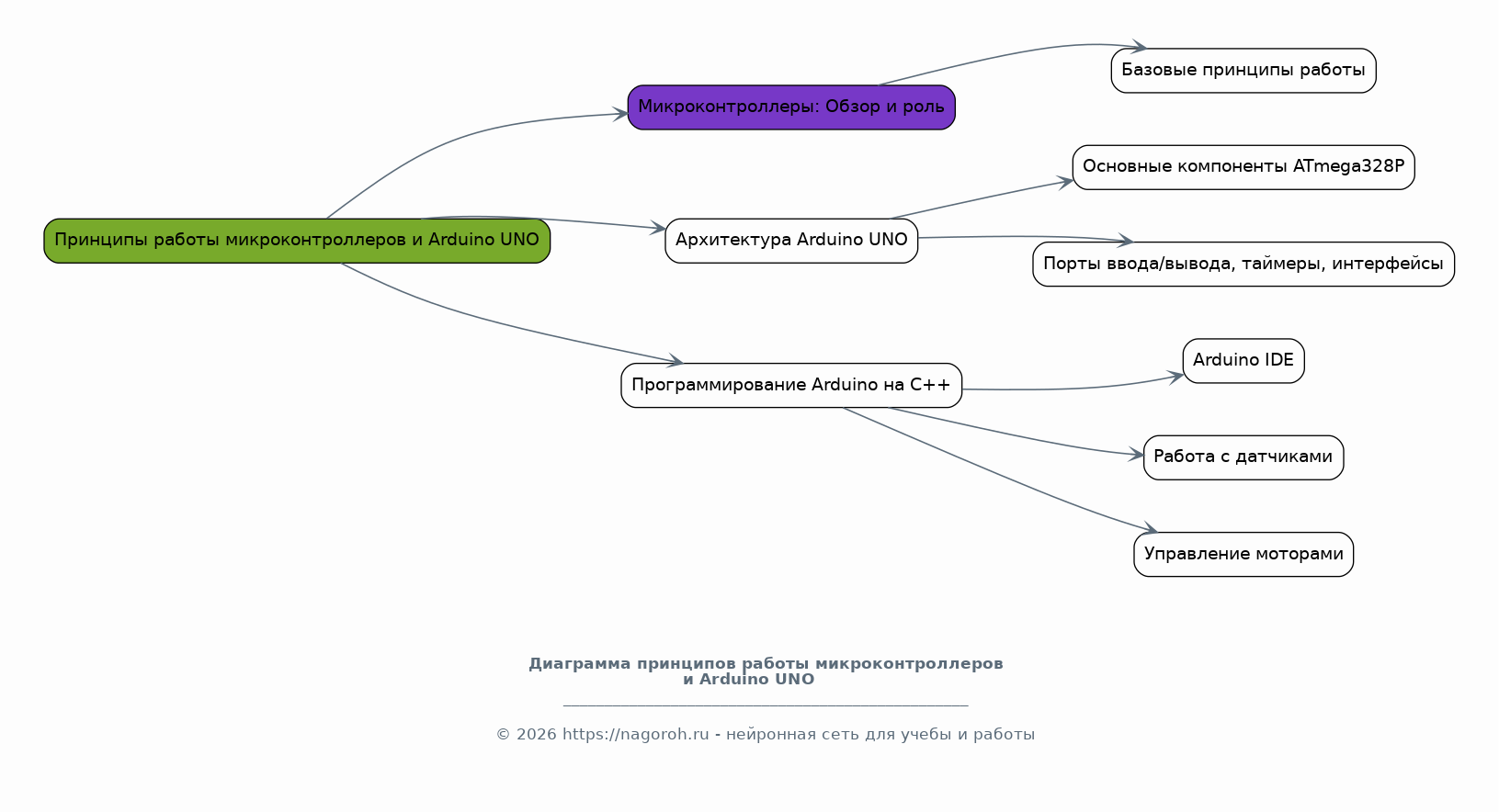
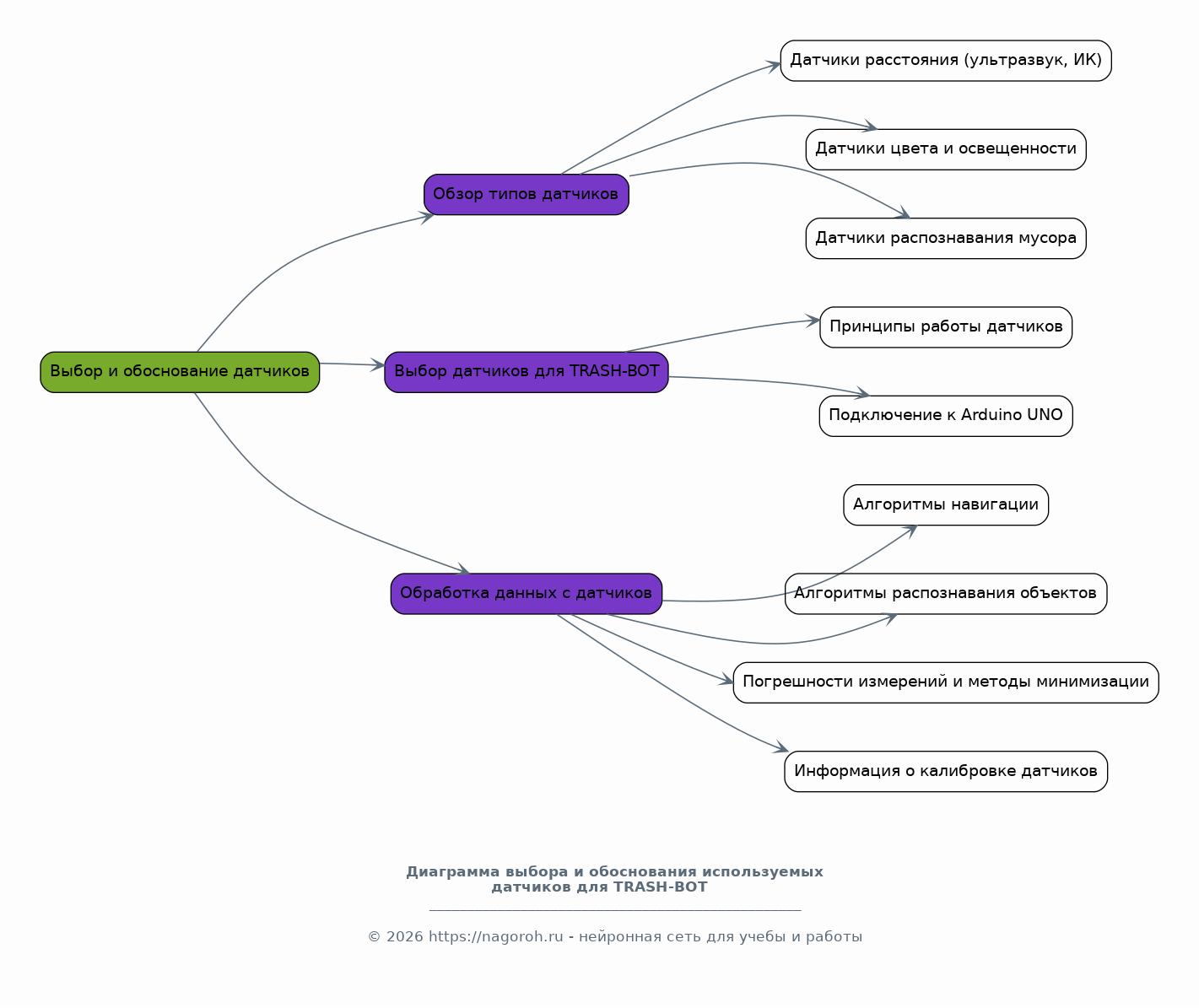
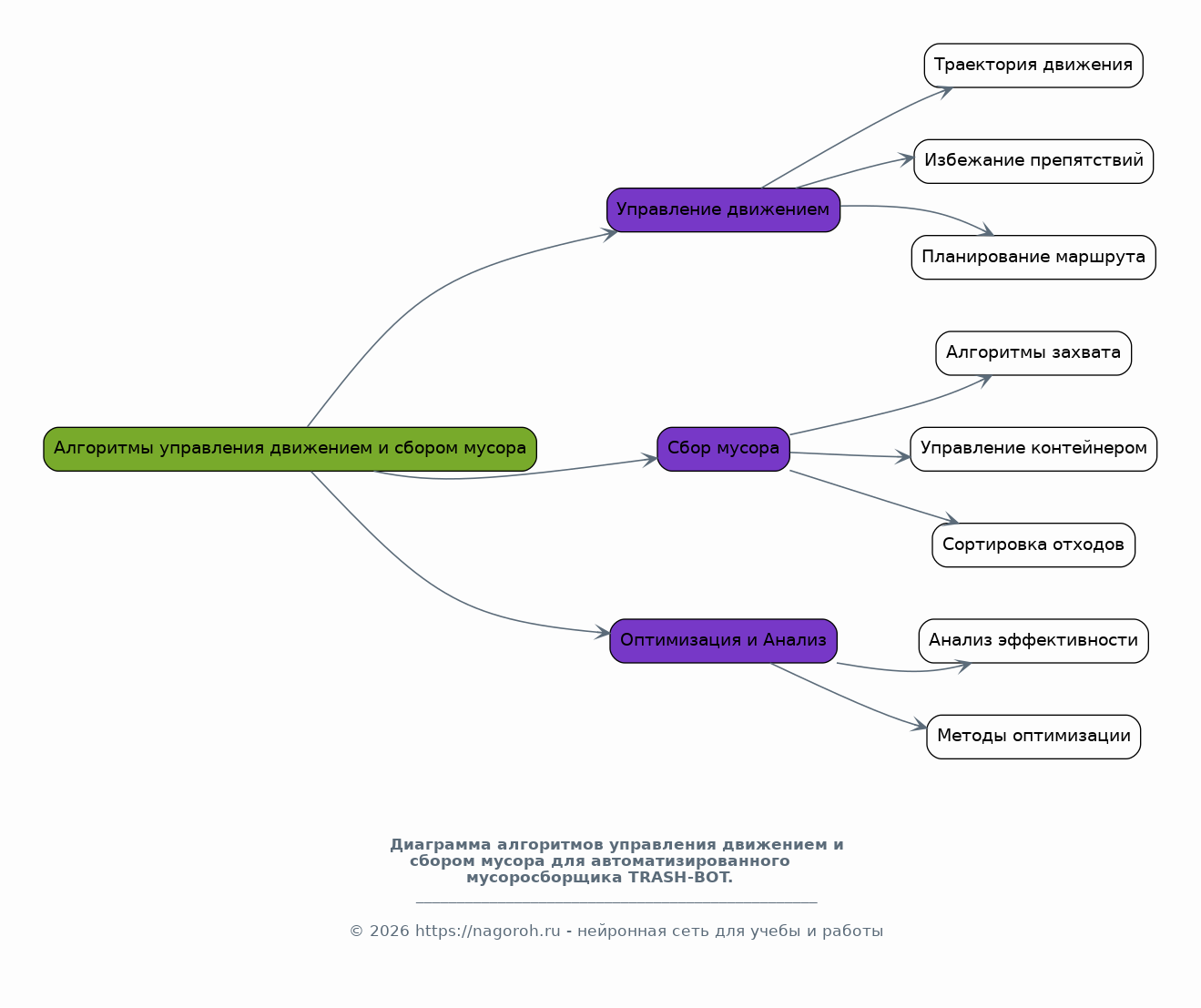
Данный исследовательский проект посвящен разработке, конструированию и программированию автоматизированного мусоросборщика, получившего название TRASH-BOT. Проект базируется на платформе Arduino UNO, что обеспечивает доступность и простоту реализации. Основная идея заключается в создании эффективного и автономного устройства, способного собирать мусор в различных условиях, таких как парки, пляжи и другие общественные места. Проект предполагает глубокое изучение принципов робототехники, программирования микроконтроллеров и работы с датчиками, моторами и другими компонентами. Особое внимание уделяется оптимизации алгоритмов управления и энергоэффективности системы, а также разработке удобного интерфейса для пользователей. В ходе проекта будет проведено моделирование, сборка прототипа, тестирование и анализ результатов, с целью оптимизации работы устройства и улучшения его характеристик. Ожидается, что TRASH-BOT сможет внести вклад в улучшение экологической обстановки и повышение сознательности населения в сфере утилизации отходов.