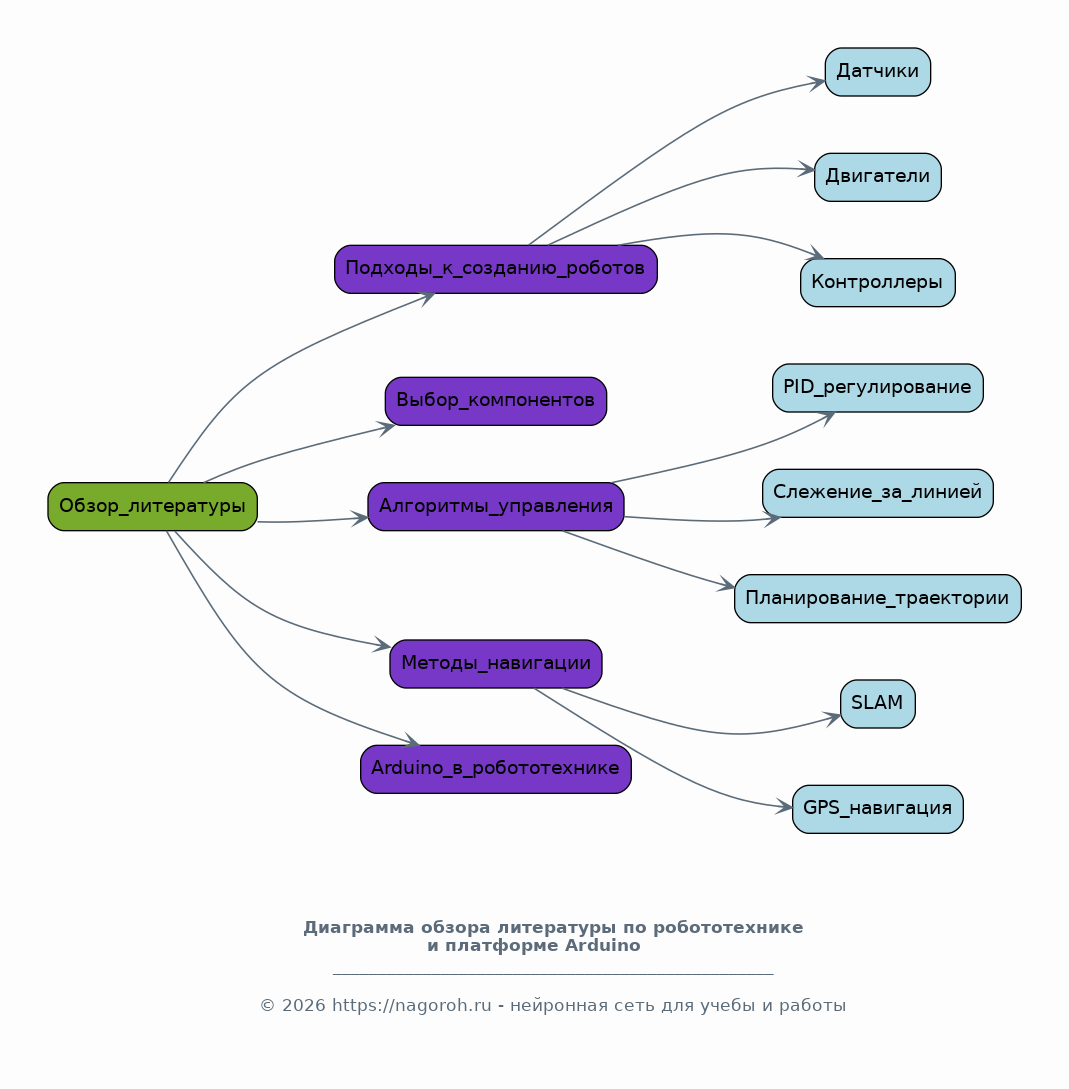
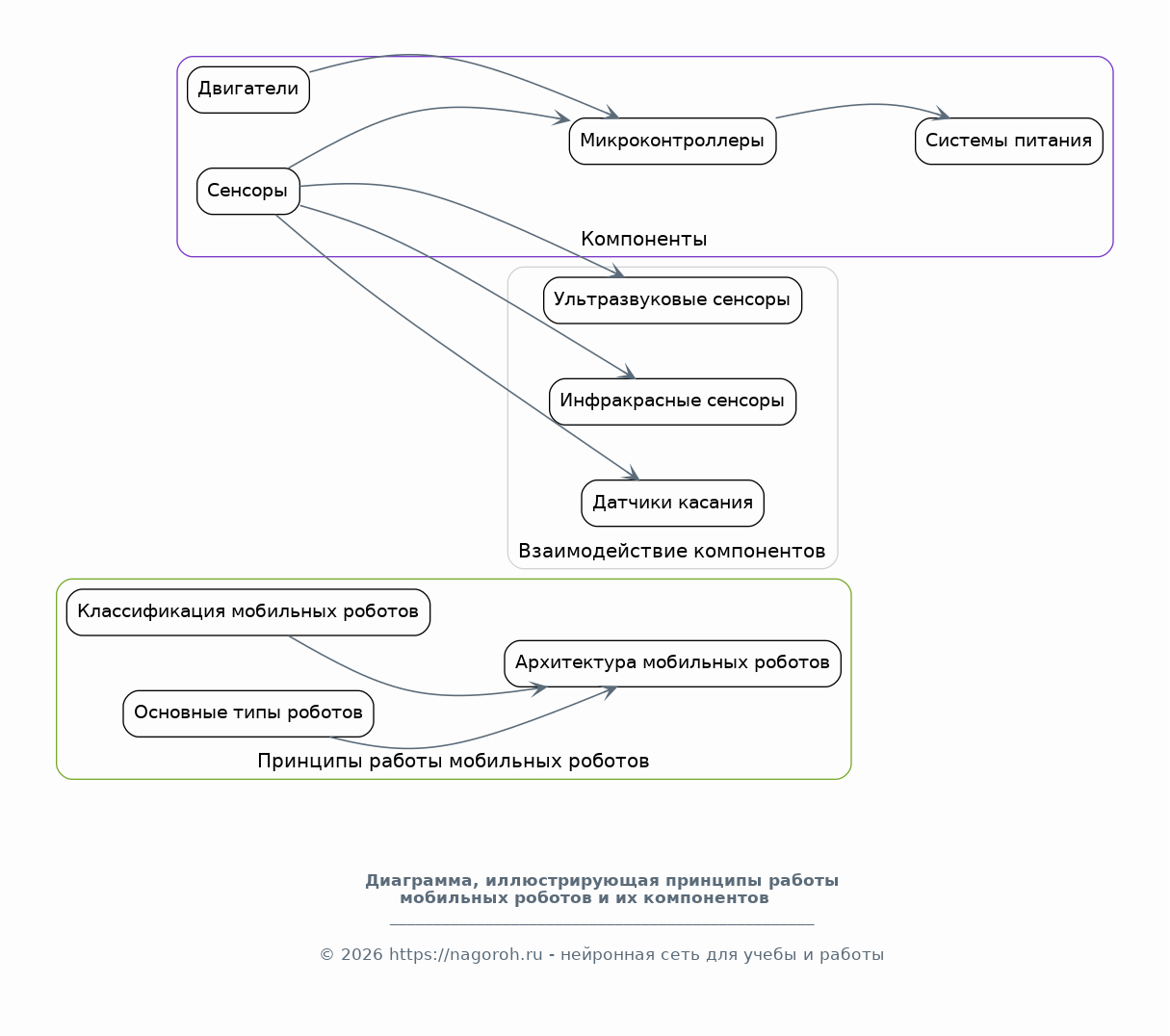
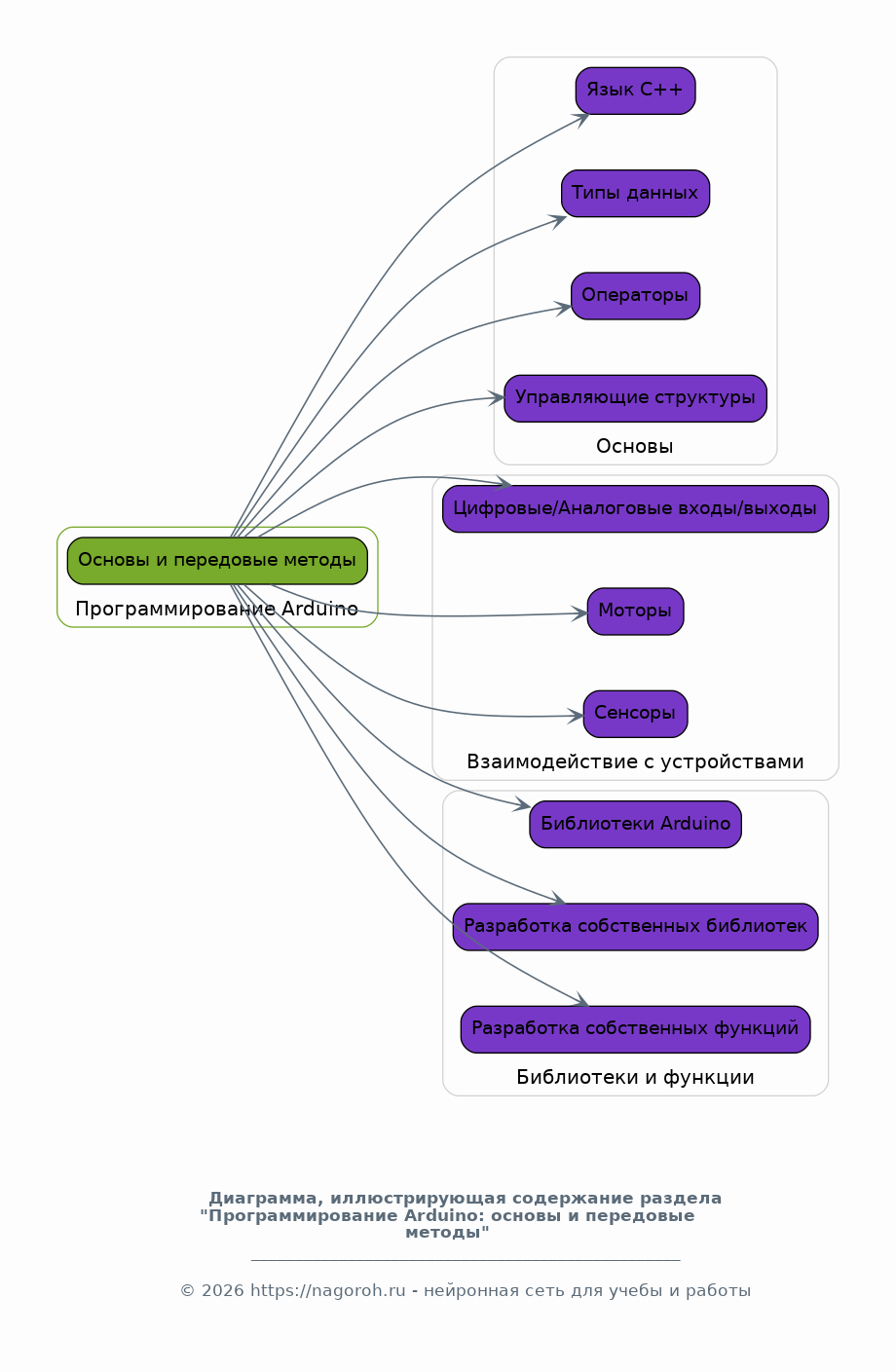
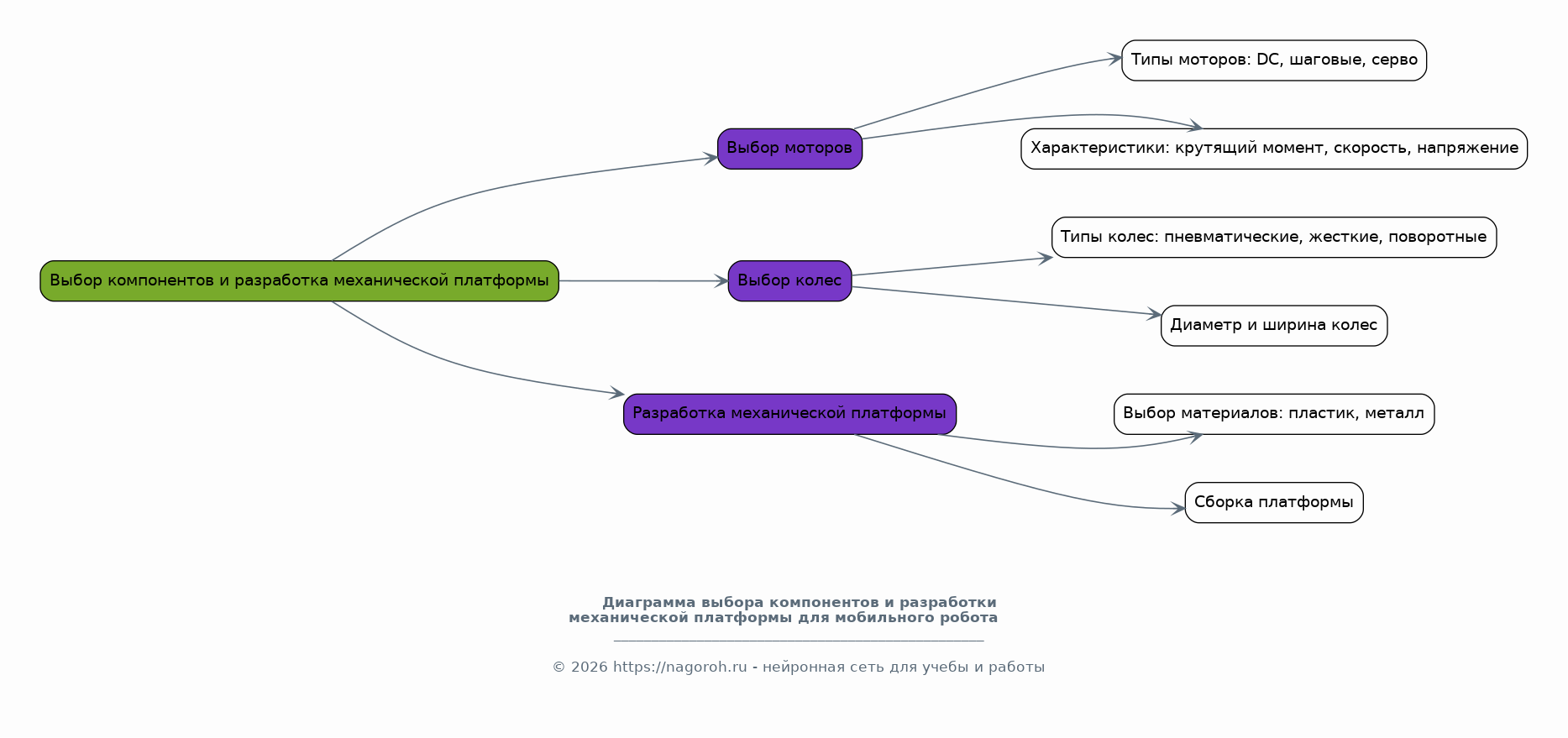
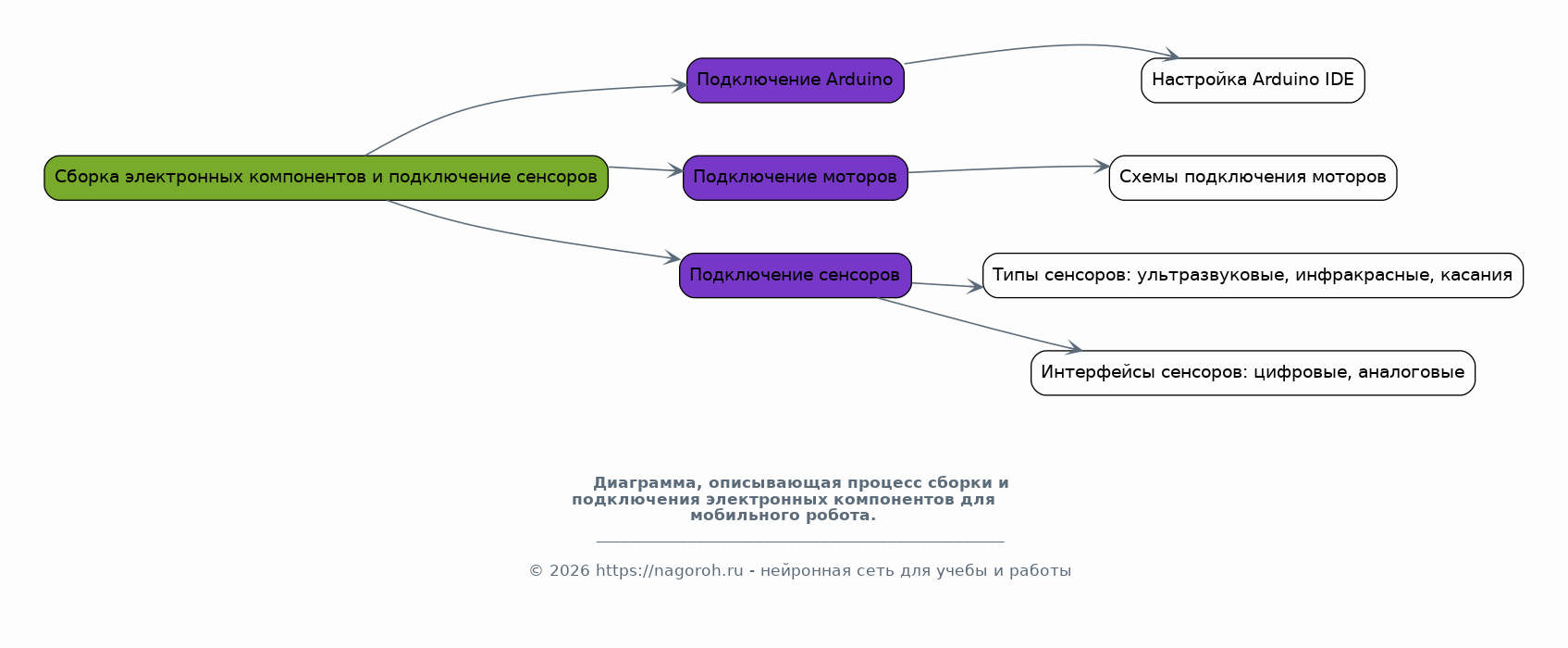
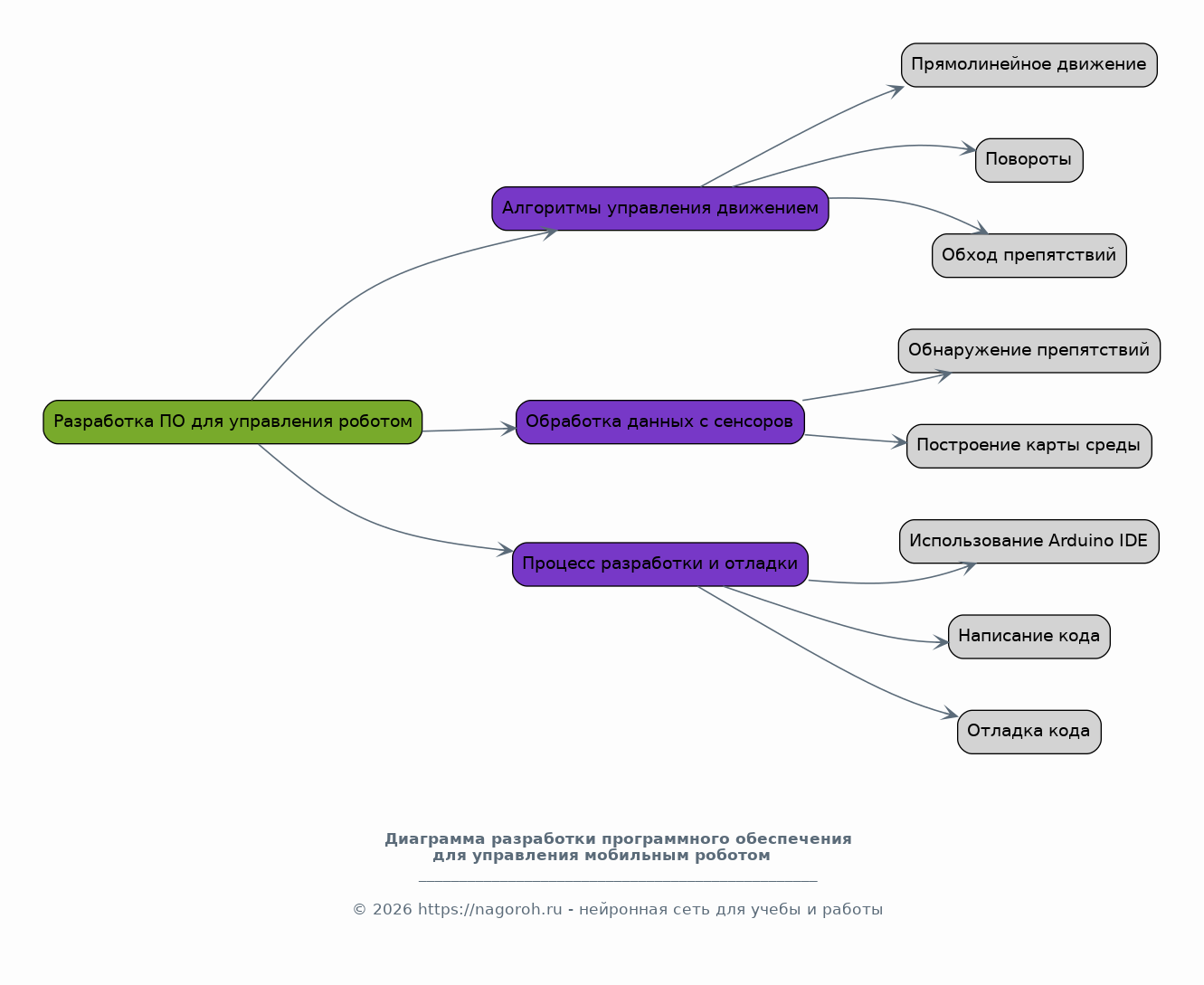
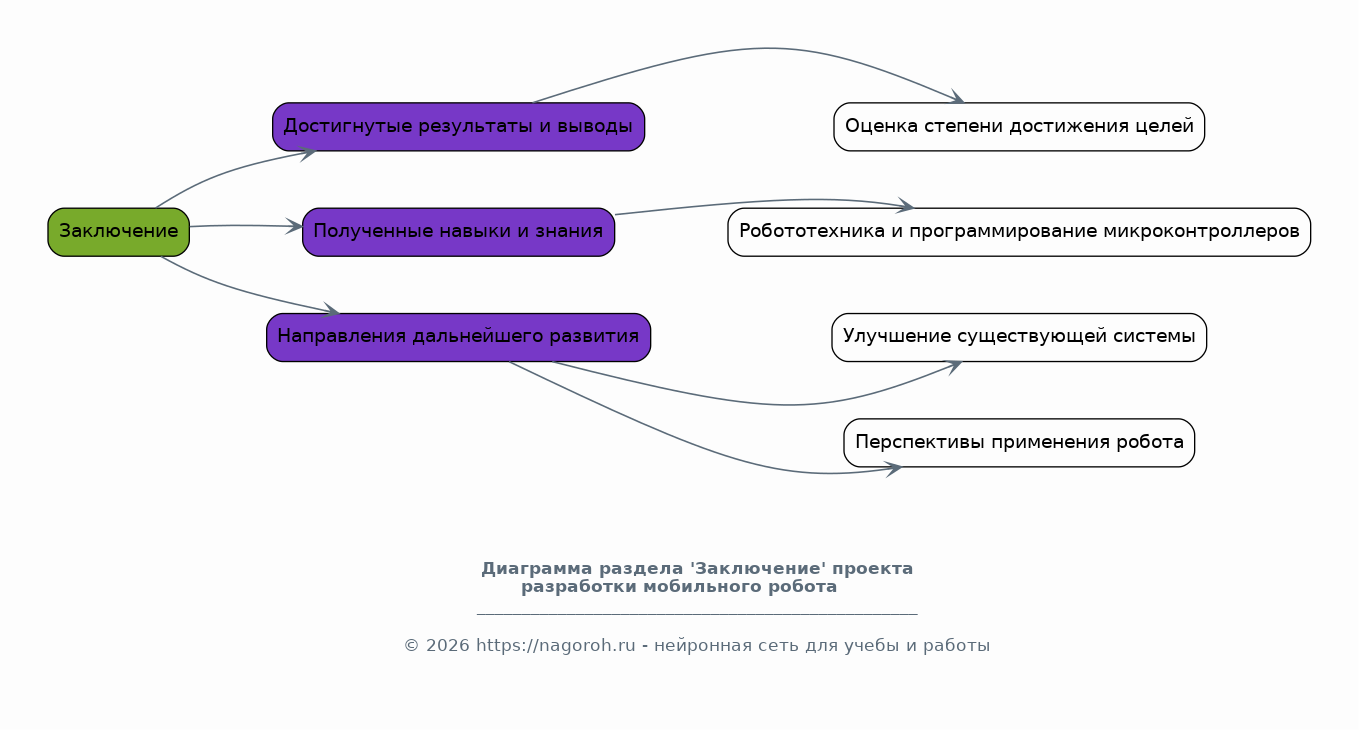
Данный исследовательский проект посвящен разработке мобильного робота с использованием микроконтроллерной платформы Arduino. Проект включает в себя анализ различных компонентов, необходимых для создания робота, таких как моторы, сенсоры, элементы питания и управляющая электроника. Особое внимание уделяется выбору оптимальных датчиков для навигации и обхода препятствий, а также разработке алгоритмов управления движением робота. В рамках проекта будет проведено исследование различных методов программирования Arduino, включая использование специализированных библиотек для управления моторами и обработки данных с сенсоров. Будет рассмотрена интеграция беспроводных каналов связи для дистанционного управления роботом. Практическая часть включает в себя сборку механической платформы, монтаж электронных компонентов, написание и отладку программного обеспечения, а также проведение испытаний для оценки эффективности работы робота. Результатом работы станет функционирующий мобильный робот, способный к самостоятельному передвижению и выполнению заданных функций.