Содержание
- Введение 1
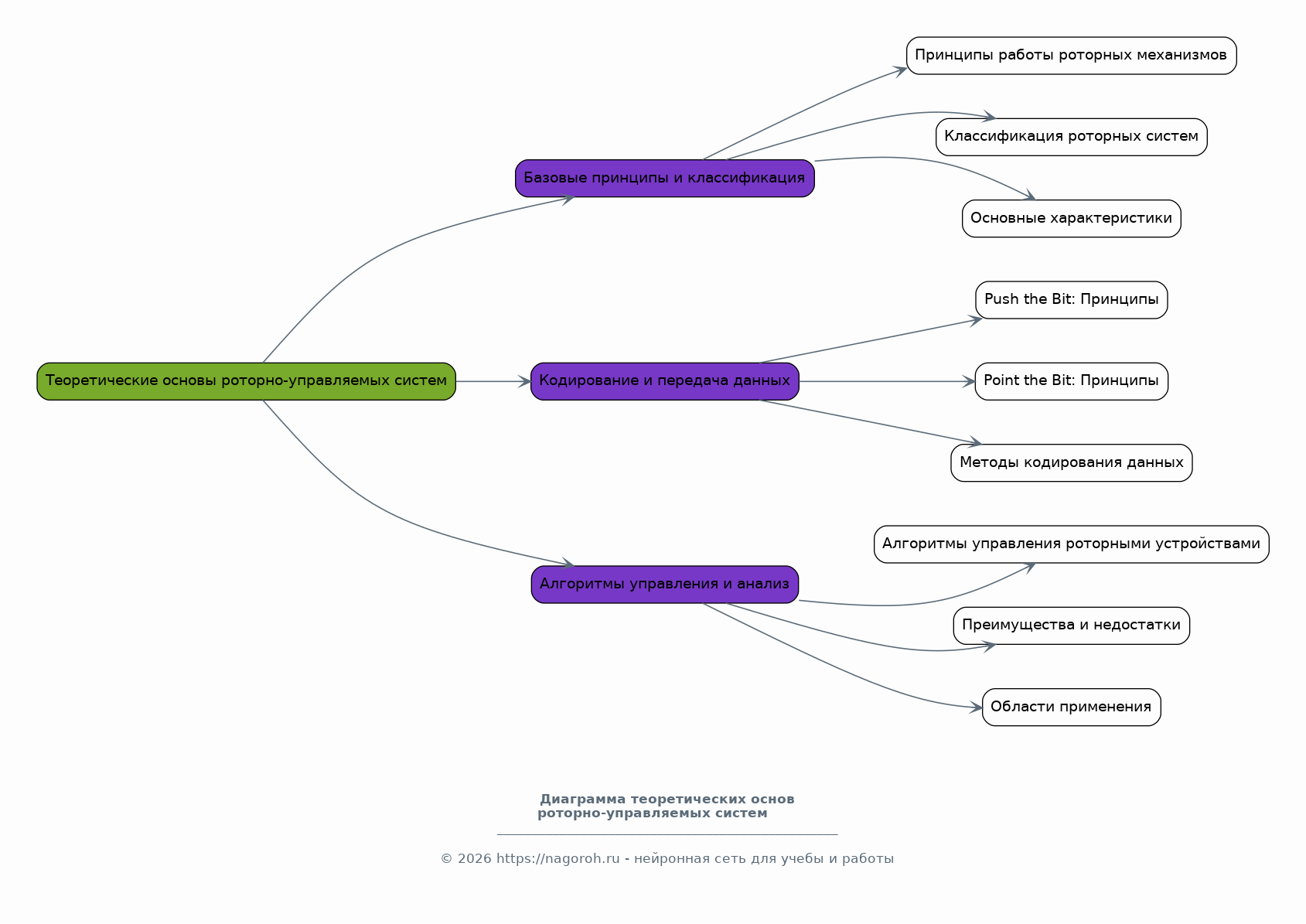
- Теоретические основы роторно-управляемых систем 2
- - Принципы работы роторных механизмов 2.1
- - Концепции 'push the bit' и 'point the bit' 2.2
- - Математическое моделирование и анализ роторных систем 2.3
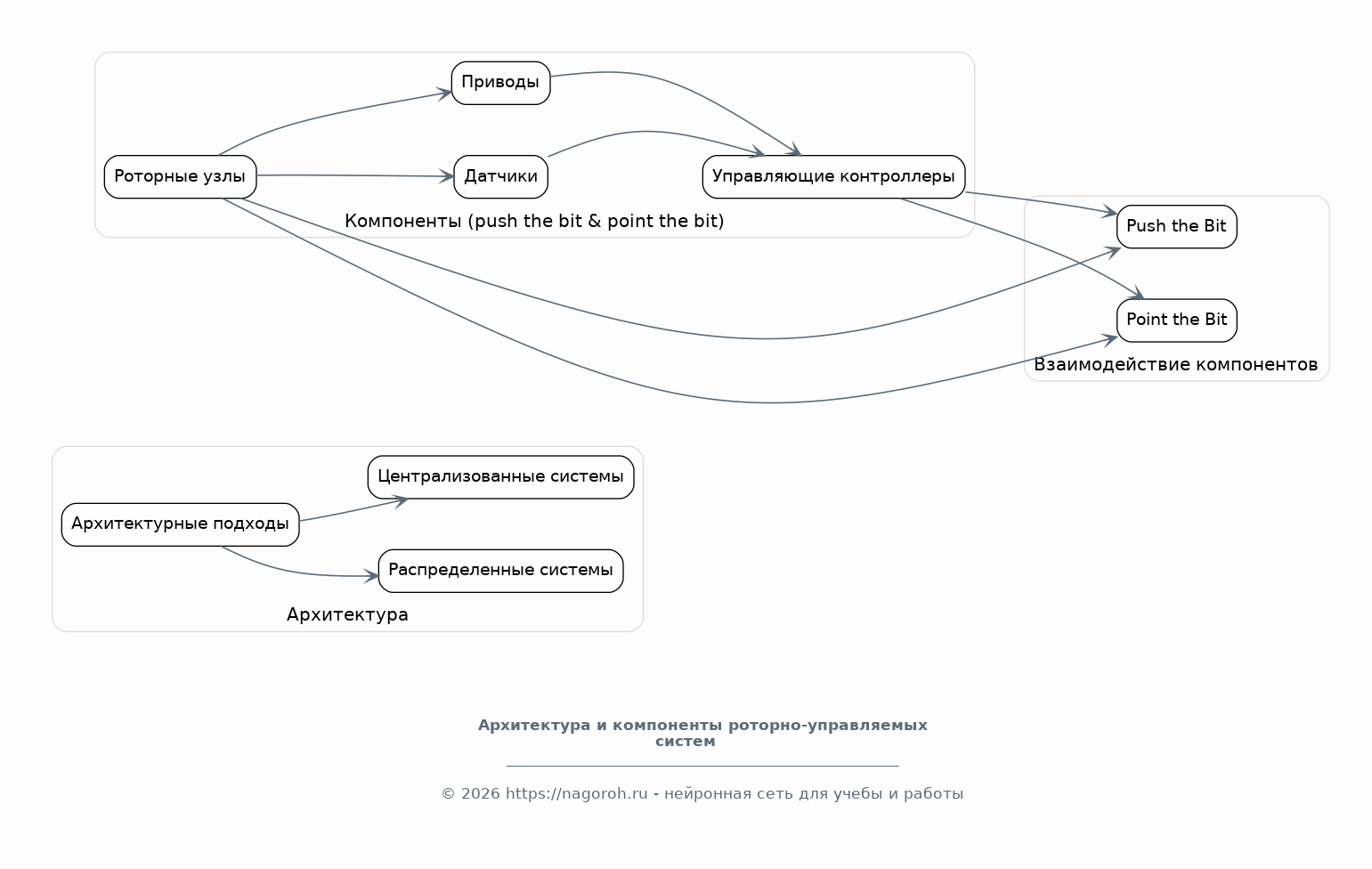
- Архитектура и компоненты роторно-управляемых систем 3
- - Архитектурные решения в роторных системах 3.1
- - Компоненты роторных систем: датчики и приводы 3.2
- - Управляющие контроллеры и программное обеспечение 3.3
- Алгоритмы управления и обработки данных 4
- - Алгоритмы управления движением и позиционирования 4.1
- - Алгоритмы коррекции ошибок и обеспечения надежности 4.2
- - Методы обработки данных и оптимизации производительности 4.3
- Практическое применение роторно-управляемых систем 5
- - Роторно-управляемые системы в системах связи 5.1
- - Применение в автоматизации и робототехнике 5.2
- - Другие области применения: примеры и анализ 5.3
- Заключение 6
- Список литературы 7